Panoramic Performance
Dynamic Comparison
Panoramic Camera
SHARP
Run inference on each of the six cubemap faces separately and stitch the outputs into one equirectangular panorama
Perspective Camera
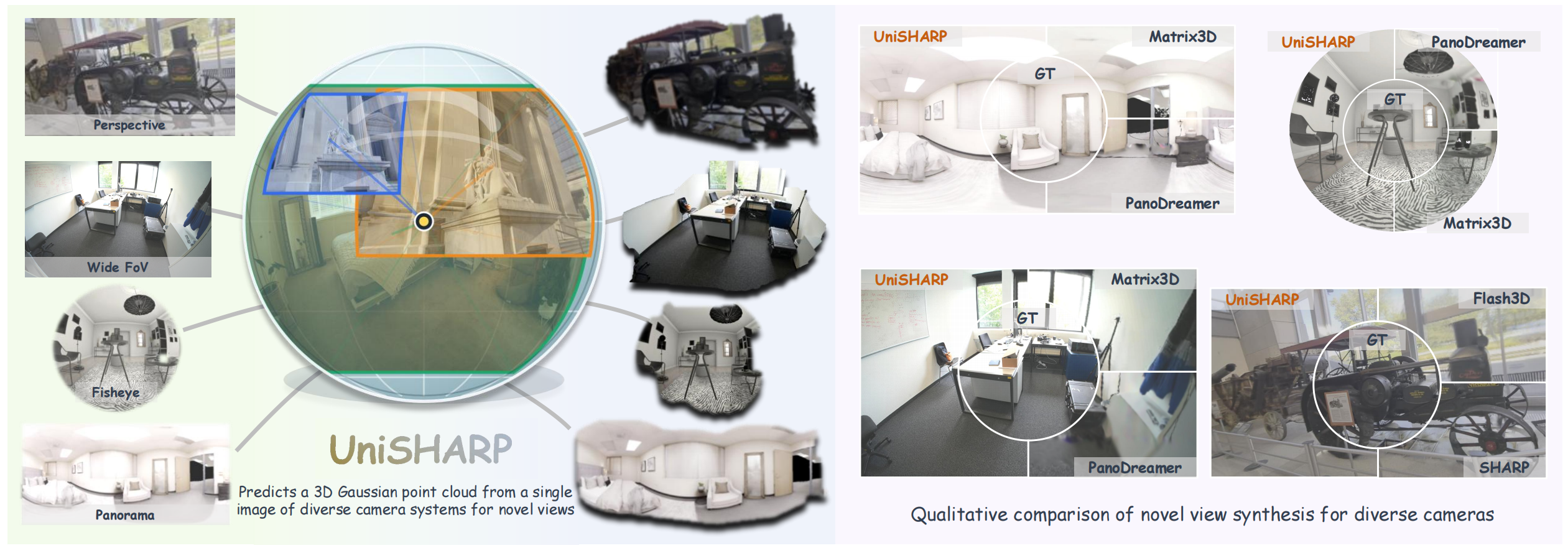
Qualitative Evaluation
Perspective
Panoramic
Fisheye
Methodology
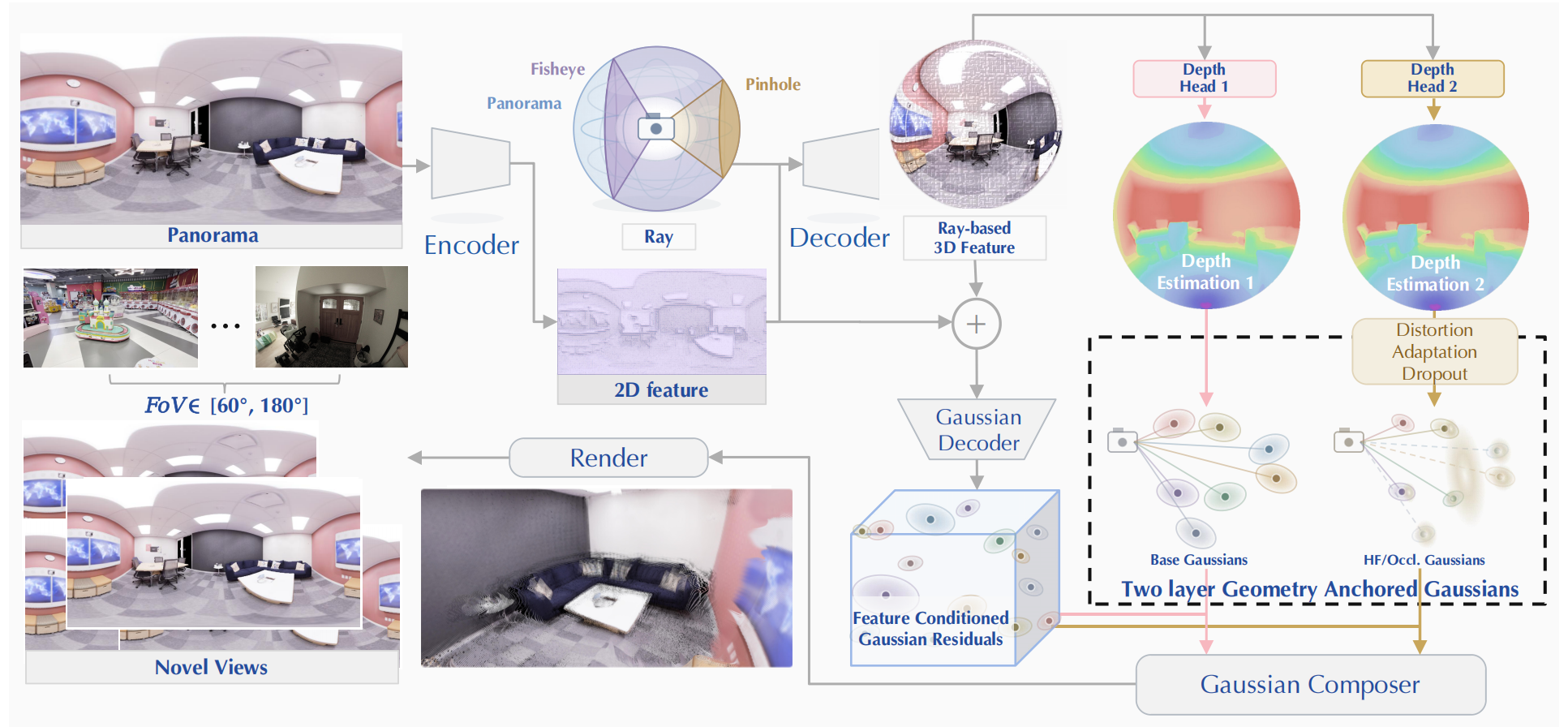
UniSHARP pipeline for universal-camera monocular novel view synthesis.
Given a single source image, UniSHARP estimates ray-distance geometry and multi-scale features, initializes two-layer Gaussians in ray-distance space, predicts Feature Conditioned Gaussian residuals, and renders target views with the unified Gaussian representation across perspective, wide-FoV, fisheye, and panoramic cameras.
Benchmark and Dataset

Composition of the proposed field-of-view stratified benchmark for universal-camera monocular novel view synthesis. Validation pairs are grouped by effective FoV and projection type, and sample counts denote evaluated source-target pairs.
Details
OmniRooms
16 Scenes (Example)
One Group (30 Images)

Citation
@article{song2026unisharp,
title={UniSHARP: Universal Sharp Monocular View Synthesis},
author={Song, Meixi and Zhang, Dizhe and Ren, Hao and Zhang, Ruiyang and Du, Bo and Yang, Ming-Hsuan and Qi, Lu},
journal={arXiv},
year={2026}
}